Description
Back to topThis workshop addresses the “virtual-to-physical” leg of the DT framework, in which the updated model is used as a basis for optimal control of the physical system or otherwise informs decisions. As with the data assimilation/inverse problem leg of DTs, quantifying uncertainties is crucial. This manifests as forward models that are characterized by random parameters, leading to optimal control problems that take the form of stochastic optimization problems that are governed by (usually PDE) models with random parameters. Specific challenges include: (1) when the random parameters are high dimensional (as in discretizations of infinite dimensional fields), and the models are sufficiently complex, solution of PDE-constrained stochastic optimization problems with conventional algorithms becomes prohibitive; (2) for critical societal problems, the objective of the optimization problem must be risk averse, rather than the risk neutral; while risk measures that quantify tail risk are available, they typically lead to non-differentiable objective functions when discretized, complicating the use of efficient optimization methods; (3) the real-time nature of DTs presents enormous challenges for optimal control of systems described by PDEs; (4) the sequential nature of the control problems can be exploited to construct algorithms that are dynamically adaptive; and (5) the sensors/observations themselves can be controlled as the physical system evolves, to better learn about the state/parameters of the system; this leads to an outer optimization problem (for control of the observing system) wrapped around a coupled data assimilation/optimal control problem, a daunting task.
Funding
All funding has been allocated for this workshop.
Poster Session
This workshop will include a poster session for early career researchers (including graduate students). In order to propose a poster, you must first register for the workshop, and then submit a proposal using the form that will become available on this page after you register. The registration form should not be used to propose a poster.
The deadline for proposing has been extended to Sunday, September 21, 2025. If your proposal is accepted, you should plan to attend the event in-person.
Organizers
Back to topSpeakers
Back to topSchedule
Speaker: Dongbin Xiu (Ohio State University)
Speaker: Samy Wu Fung (Colorado School of Mines)
Speaker: Enrique Zuazua (University of Erlangen-Nuremberg)
Speaker: Bart Van Parys (CWI Amsterdam)
Speaker: Tapio Helin (LUT University, Finland)
Speaker: Karl Kunisch (Graz University and Radon Institute, Austria)
Speaker: Drew Kouri (Sandia Albuquerque)
Speaker: Harbir Antil (George Mason University)
Speaker: Tommie Catanach (Sandia Livermore)
Speaker: Alen Alexanderian (NC State University)
Speaker: Krithika Manohar (University of Washington)
Speaker: Ying Cui (University of California, Berkeley)
Speaker: Boris Kramer (University of California, San Diego (UCSD))
Speaker: Alex Gorodetsky (University of Michigan)
Speaker: Tom Rainforth (Oxford University)
Speaker: Victor Zavala (Unviersity of Wisconsin)
Speaker: Karl Worthmann (Ilmenau University of Technology)
Speaker: Sam Hansen (IMSI)
Speaker: Boris Houska (Shanghaitech University)
Speaker: Bart van Bloemen Waanders (Sandia Albuquerque)
Speaker: Mihai Anitescu (UChicago & Argonne NL)
Poster Session
Back to topPosters submitted in advance can be viewed on this page.
Videos
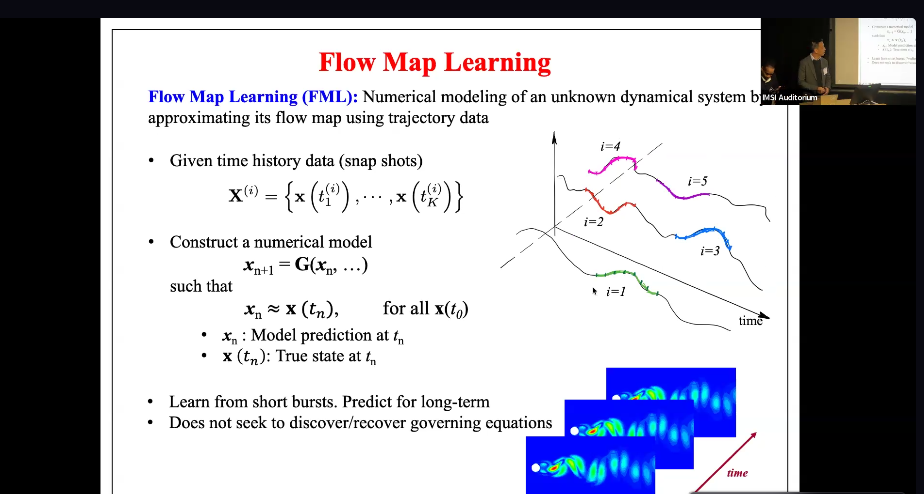
Data Driven Modeling for Scientific Discovery and Digital Twins
Dongbin Xiu
October 27, 2025
Jacobian Free Backpropagation for High-Dimensional Optimal Control with Implicit Hamiltonians
Samy Wu Fung
October 27, 2025
Hybrid-Cooperative Learning for PDEs
Enrique Zuazua
October 27, 2025
Optimal Decisions with Messy Data and Uncertainty
Bart Van Parys
October 27, 2025
Lightning talks, followed by Poster Session and Social Hour
Lightning Talks
October 27, 2025
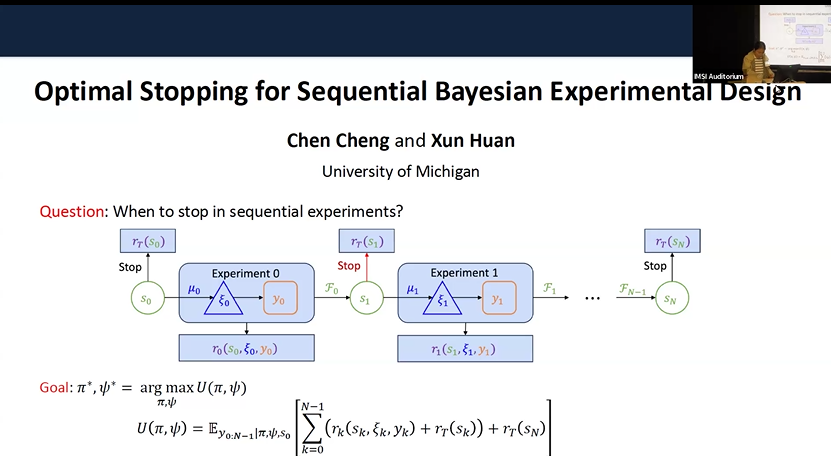
Novel information criteria in Bayesian experimental design
Tapio Helin
October 28, 2025
Solving the Hamilton Jacobi Bellman equations of optimal control and state-estimation: towards taming the curse of dimensionality
Karl Kunisch
October 28, 2025
An Inexact Trust-Region Method for Nonsmooth and Risk-Averse PDE-Constrained Optimization
Drew Kouri
October 28, 2025
Robust Bayesian Optimal Experimental Design under Model Misspecification
Tommie Catanach
October 28, 2025
Control-oriented optimal sensor placement for inverse problems governed by PDEs
Alen Alexanderian
October 29, 2025
Sparse Sensor Optimization Under Uncertainty
Krithika Manohar
October 29, 2025
Stochastic Optimization with Superquantile Constraints: A Fast Computational Approach
Ying Cui
October 29, 2025
Control-oriented reduced-order models for digital twins
Boris Kramer
October 29, 2025
A Graph-Theoretic Perspective on Optimization: Theory, Modeling, Algorithms, and Applications
Victor Zavala
October 30, 2025
Predictive control using data-driven Koopman surrogate models
Karl Worthmann
October 30, 2025
Communicating Mathematical and Technical Content to all Audiences Workshop
Sam Hansen
October 30, 2025
Operator-Theoretic Learning and Control: A Paradigm Shift in Stochastic Systems Theory
Boris Houska
October 31, 2025
Hyper-Differential Sensitivity Analysis for Updating Optimal Control Solutions
Bart van Bloemen Waanders
October 31, 2025
Exponential Decay of Sensitivity in Control and Other Graph-Indexed Optimization Problems and Consequences for Digital Twins.
Mihai Anitescu
October 31, 2025